We are very interested in building systems that require a heavy interdisciplinary interaction between a number of engineering disciplines. The national needs in robotics, automation, manufacturing, and intelligent systems are pushing scientists and engineers to learn more about different disciplines to be able to build coherent systems. Using computers to build platforms and environments for various prototyping activities in those fields is becoming a necessity. The end product of research of this highly interdisciplinary nature would be:
The interdisciplinary nature of the computer-aided prototyping research provides exciting opportunities to develop new and efficient algorithms and strategies for coordinating the efforts of the different groups involved. We believe that graduating engineers, especially in the fields of computer science and engineering, and electrical engineering should have much more interdisciplinary knowledge about other engineering, physics, and mathematics areas than what they currently have, on the average. The interdisciplinary nature of our research provides an exceptional educational environment for those involved in the work. Our practice is to insure that each research associate is aware of and contributes to all aspects of the big project, not just the individual research problem he or she is working on at the time. The intention is to produce graduates with a depth and breadth of experience which makes them especially well qualified to tackle demanding problems in science and engineering.
The United States is experiencing a major economic battle in the global market place. The main justification for research of this nature is that a success will put us in a better competitive position vis-a-vis the rest of the world. If the approach to computer-aided prototyping and its use to solve reliably, efficiently, modularly, and rapidly a number of problems within electromechanical and physical systems design and modeling, real-time software and hardware controllers, monitors, and observers succeeds; then we stand to significantly impact prototyping, automation and manufacturing.
The CISE robot prototyping environment project resulted in a concurrent and flexible design environment for prototyping robots , in addition to the ``URK'' (Utah Robot Kit) robot. In the Hybrid Systems Control Project, we are working to develop a graphical DES (Discrete Event System) hybrid controller, simulator, and analysis framework. The framework allows for the control, simulation and monitoring of dynamic systems that exhibits a combination of symbolic, continuous, discrete, and chaotic behaviors, and includes stochastic timing descriptions, probabilistic transitions, controllability and observability definitions, temporal, timed, state space, petri-nets, and recursive representations, analysis, and synthesis algorithms.
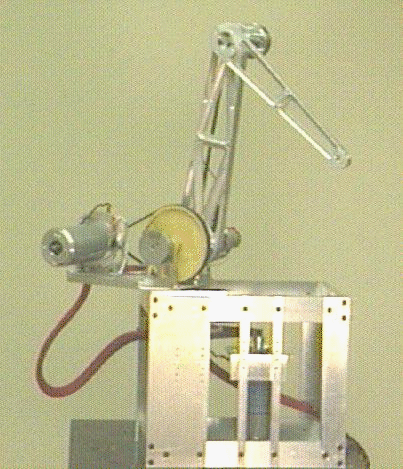 The
Utah Robot Kit (URK)
The
Utah Robot Kit (URK)
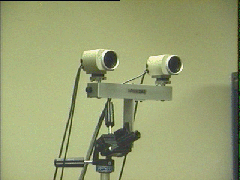 The Robotics and Sensing Group
The Robotics and Sensing Group
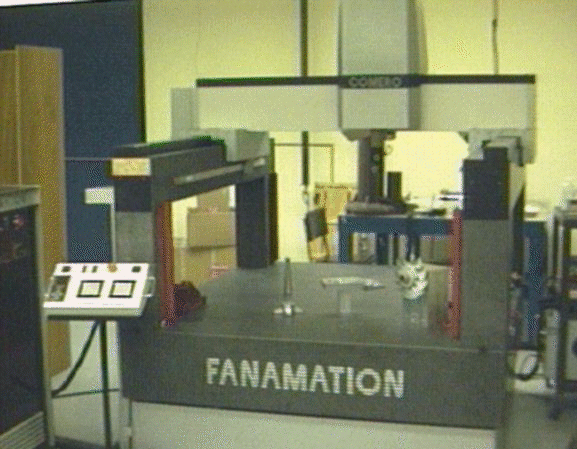 The Advanced Manufacturing Laboratory (AML)
The Advanced Manufacturing Laboratory (AML)